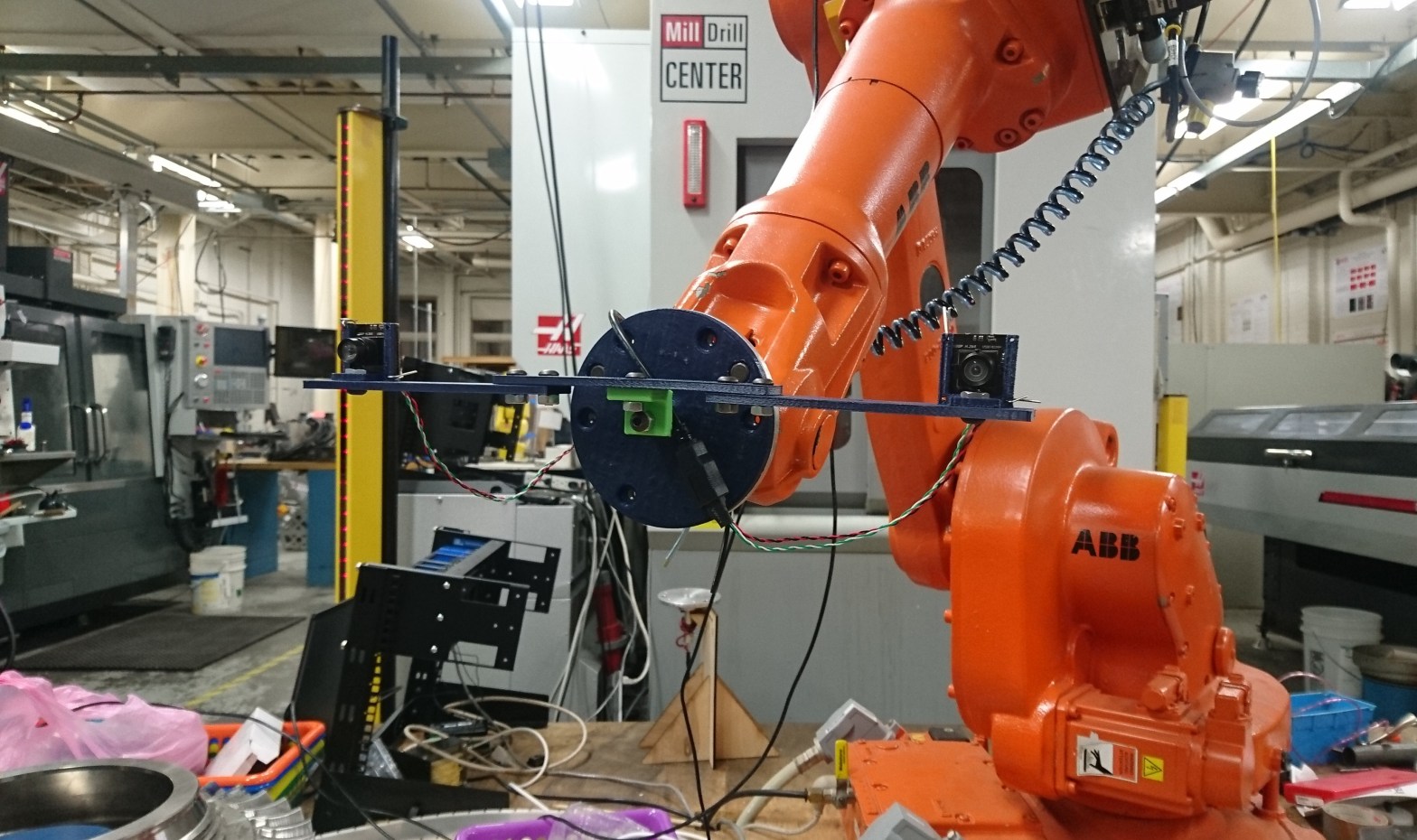
In my industrial robotics course at WPI my team and I worked to implement an object-following industrial arm using OpenCV, ROS-I, and an ABB IRB1600 arm. The premise of the work came from our senior design and fabrication project, where we intend to have a robot ‘observe’ invasive lionfish. To demonstrate progress on the vision software and communication protocols, we were advised to develop a testing platform for an interim robot. A video can be seen below of object tracking in RVIZ.
When it came time to try connecting the ROS master to the ABB arm, we encountered communication errors that we unfortunately couldn’t solve before the semester ended. This meant we had to settle for the simulation as our submission.

Coming at the problem now, almost a decade later, I would expect to understand more about the problem and push progress farther. As of writing this in Jan of 2025, I expect to have my AR4-MK3 robotic arm up and running, and demonstrating communication between ROS and the arm’s driver hardware. Stay tuned for that!
/hyperlink to AR4-MK3 project page

One thought on “OpenCV, ROS-I, & ABB IRB1600 Industrial Arm”