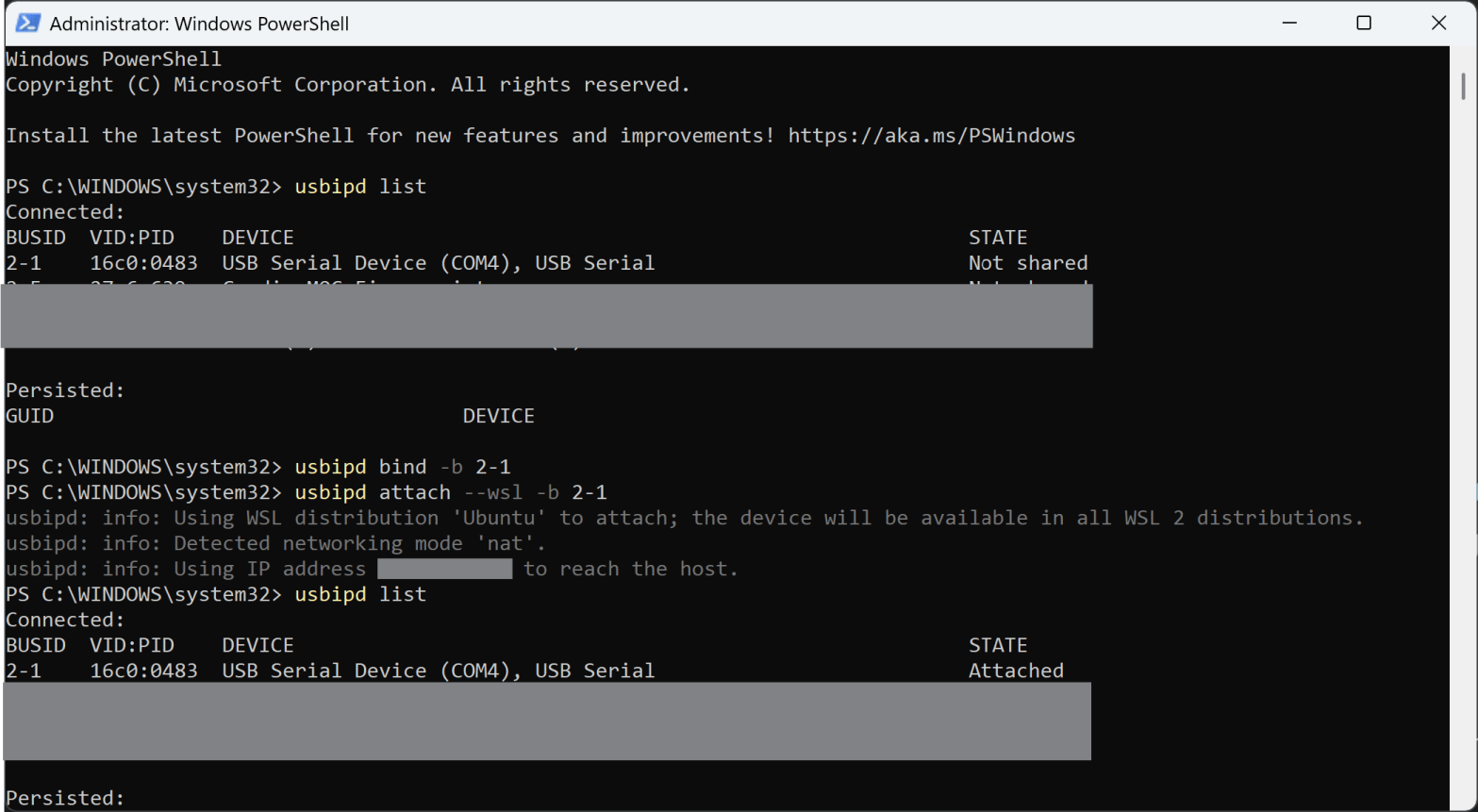
Well, that was a bit of work. I have finally got the AR4-MK3 robotic arm working using ROS-2! For this I’m using Windows Subsystem for Linux (WSL), attaching the serial port to WSL, launching the AR4 driver, and bringing up RVIZ. I’ve graphically programmed some movements, so there’s not a lot of functionality now. However,Continue reading “AR4-MK3: ROS-2 Commissioned!”
Category Archives: Robotics
3-mobile holonomic robot
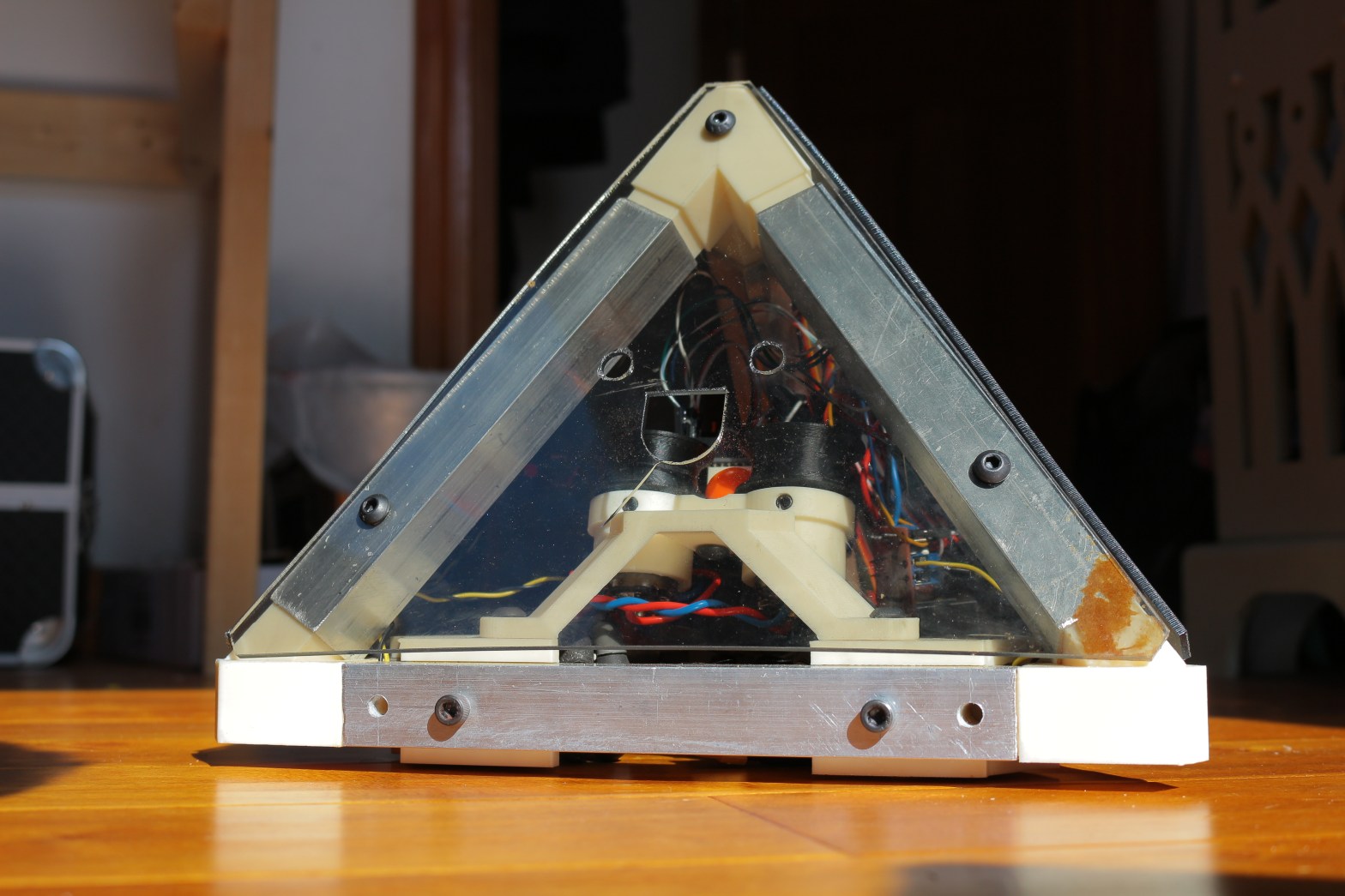
As a fun side-project during 2020 I built a 3-mobile holonomic robot using some aluminum extrusion, 3d printed pieces, and Arduinos for both the control board and a remote control transmitter. I’ve featured it in the video embedded below: Additionally, I’ve included some files necessary to build your own on Thingiverse: https://www.thingiverse.com/thing:4147725
Clearpath Jackal UGV: Beginnings
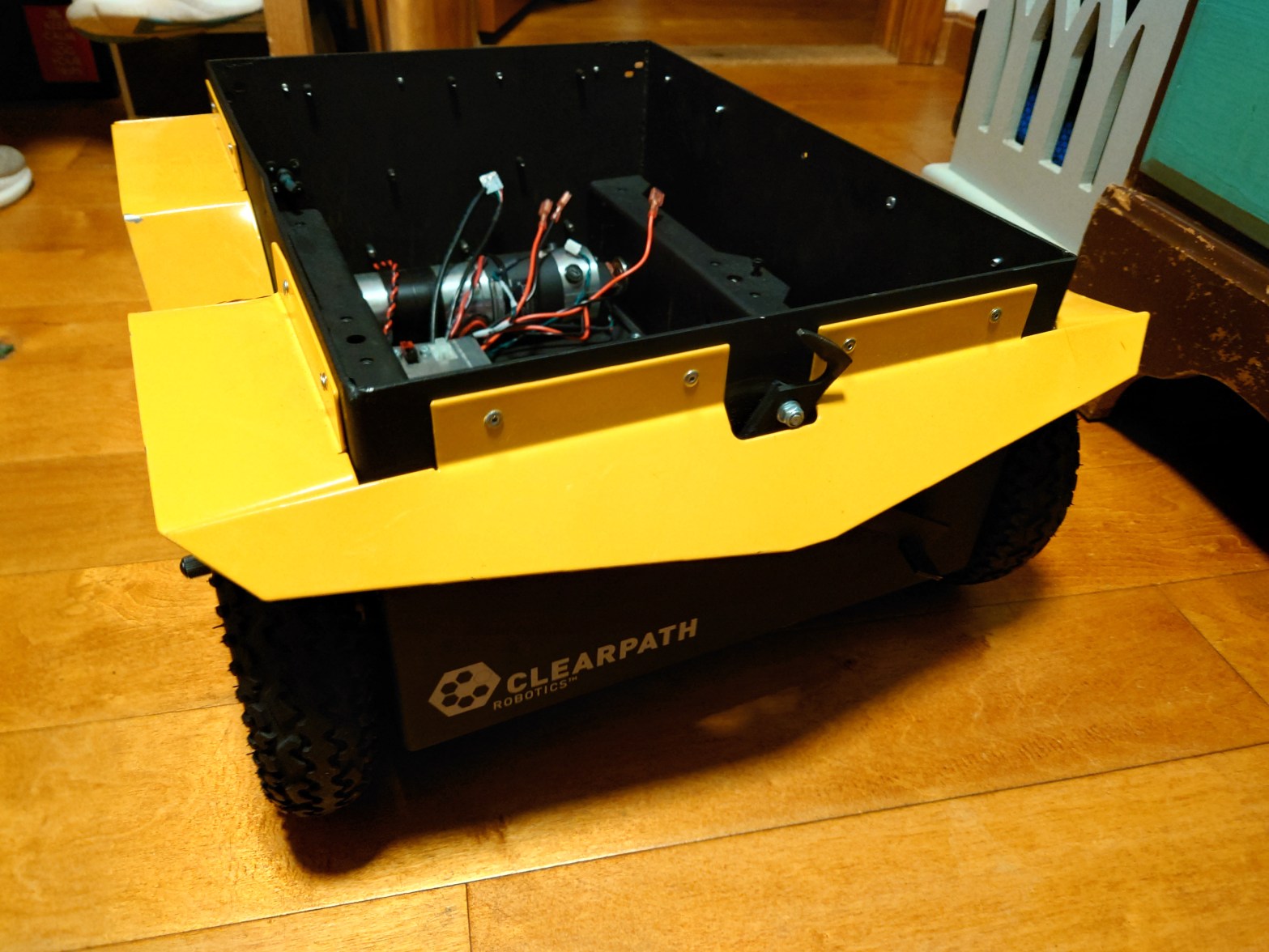
I recently had the luck to come across a Clearpath Jackal chassis on the Facebook marketplace. The Jackal is a very common research and development UGV, however models from Clearpath can cost upwards of $18,000. Needless to say, I got the chassis at a much lower price point. There are various issues with the chassis,Continue reading “Clearpath Jackal UGV: Beginnings”
AR4-MK3: The Build

The AR4-MK3 is a well-featured open-plan 6 DOF arm designed by Chris Annin of Annin robotics. Annin Robotics – open source 6 axis robots you can build yourself The AR4-MK3 is used as a teaching aid, research platform, and general hobbyist robotic arm. This blog post dives into what it took to assemble the robotContinue reading “AR4-MK3: The Build”
Cable-Driven Parallel Robot Simulation
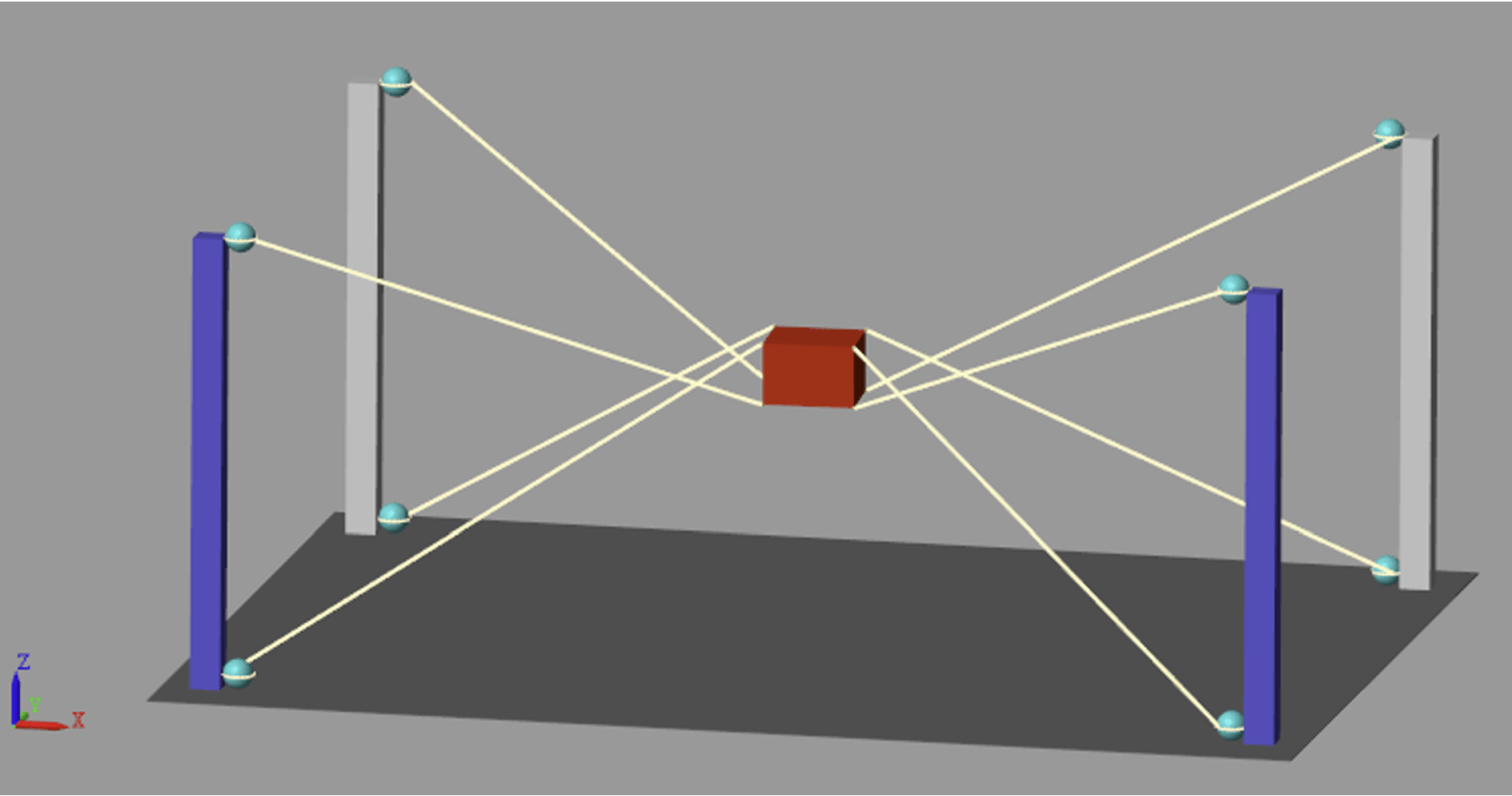
Cable Driven Parallel Robots (CDPR) are lightweight, versatile, and have benefits that let them compete with gantry style and serial-arm manipulators. A CDPR is a mechanism with an end effector that is oriented and translated through tensioning flexible cables, rather than rotating solid links of a classic industrial robotic arm. Because CDPRs do not haveContinue reading “Cable-Driven Parallel Robot Simulation”
OpenCV, ROS-I, & ABB IRB1600 Industrial Arm
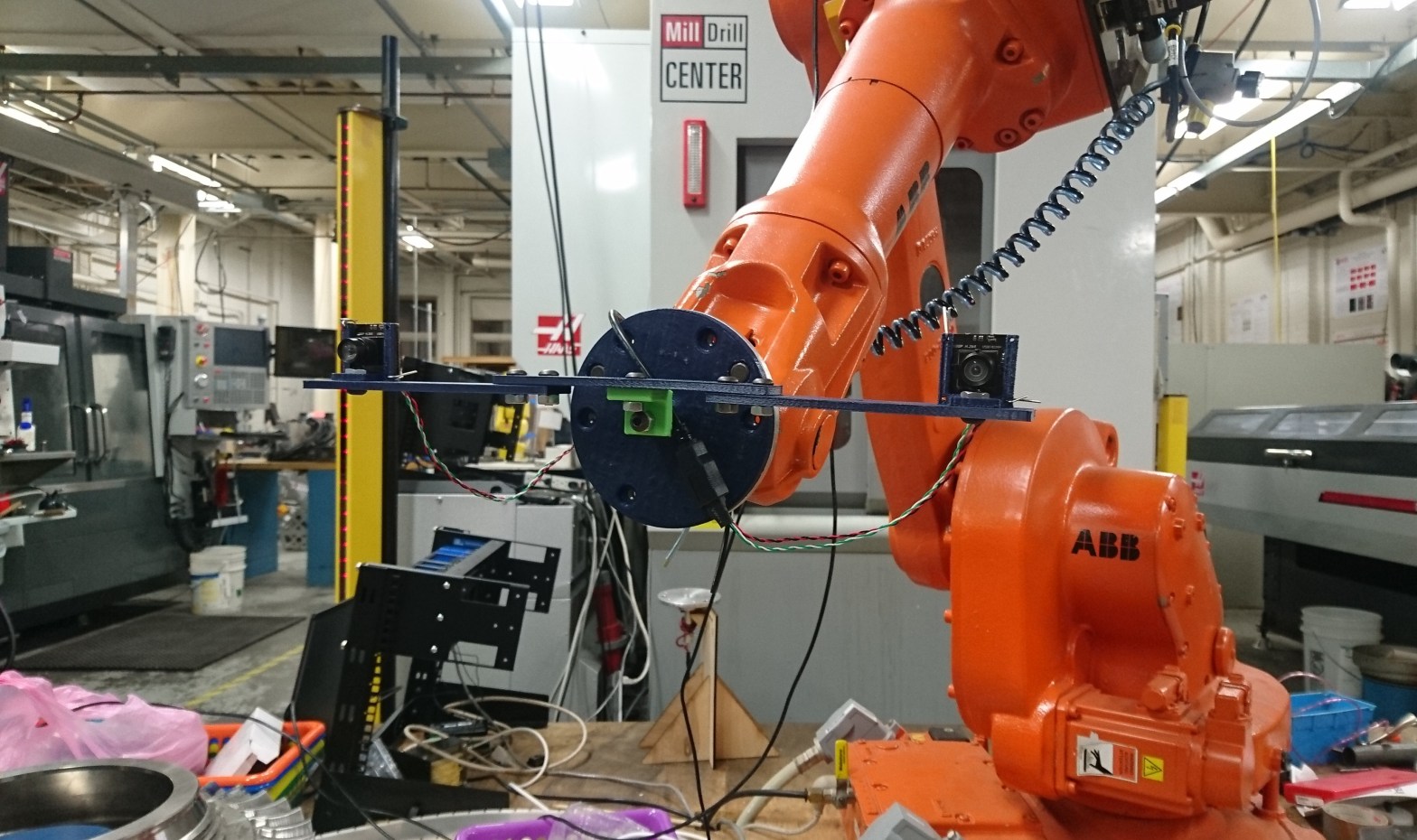
In my industrial robotics course at WPI my team and I worked to implement an object-following industrial arm using OpenCV, ROS-I, and an ABB IRB1600 arm. The premise of the work came from our senior design and fabrication project, where we intend to have a robot ‘observe’ invasive lionfish. To demonstrate progress on the visionContinue reading “OpenCV, ROS-I, & ABB IRB1600 Industrial Arm”
