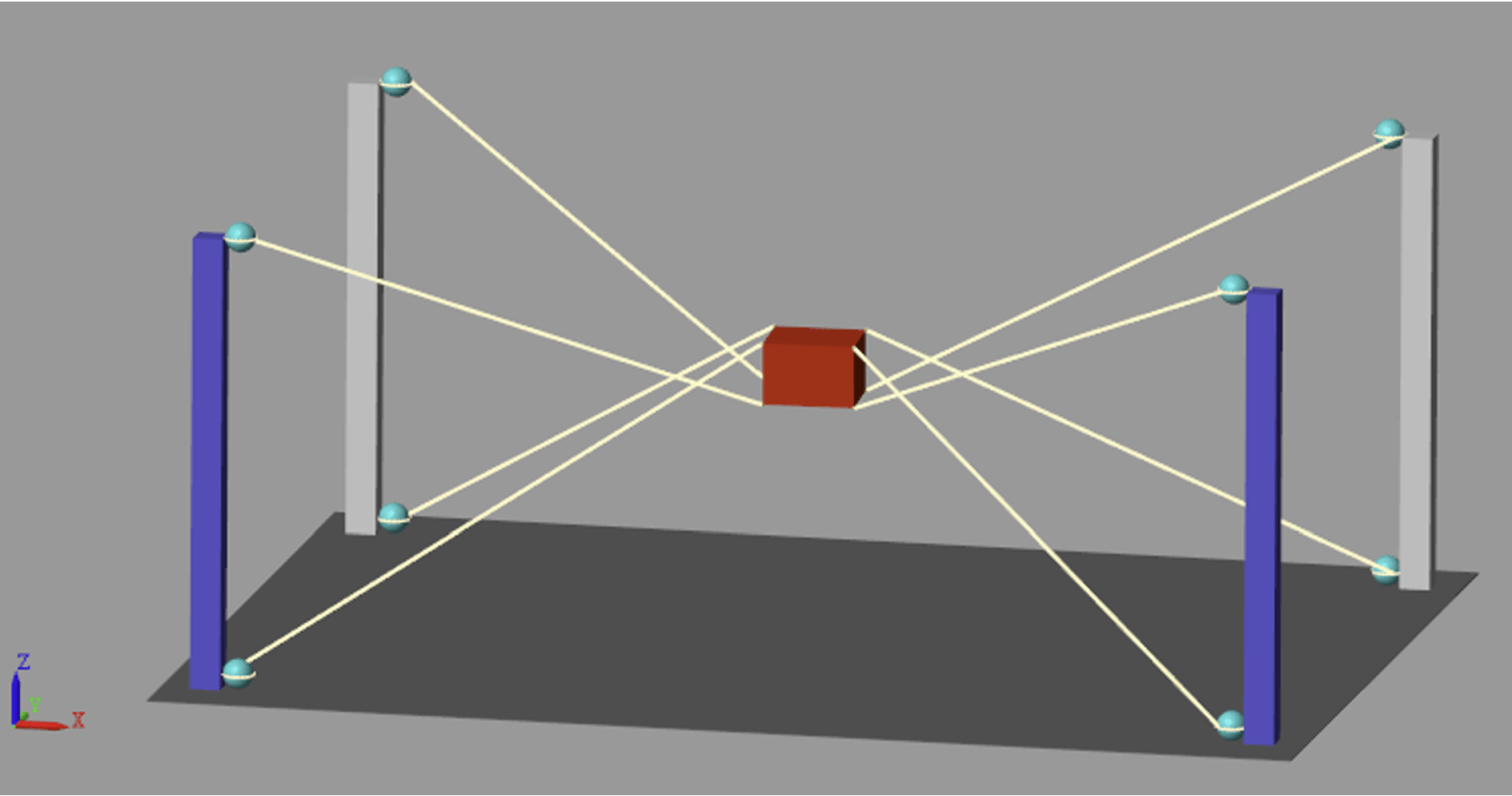
Cable Driven Parallel Robots (CDPR) are lightweight, versatile, and have benefits that let them compete with gantry style and serial-arm manipulators. A CDPR is a mechanism with an end effector that is oriented and translated through tensioning flexible cables, rather than rotating solid links of a classic industrial robotic arm. Because CDPRs do not haveContinue reading “Cable-Driven Parallel Robot Simulation”
-
Subscribe
Subscribed
Already have a WordPress.com account? Log in now.
