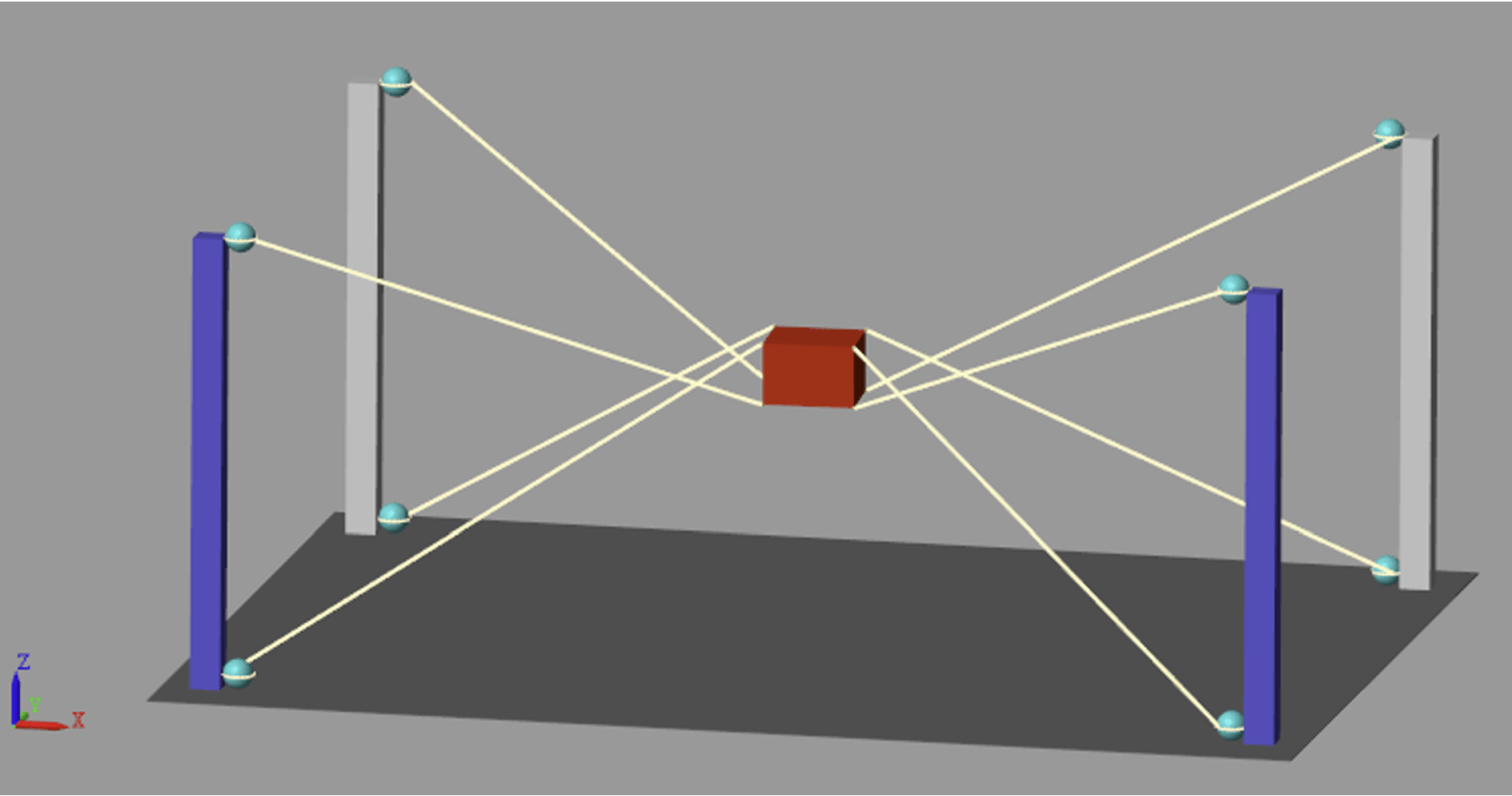
Cable Driven Parallel Robots (CDPR) are lightweight, versatile, and have benefits that let them compete with gantry style and serial-arm manipulators. A CDPR is a mechanism with an end effector that is oriented and translated through tensioning flexible cables, rather than rotating solid links of a classic industrial robotic arm. Because CDPRs do not haveContinue reading “Cable-Driven Parallel Robot Simulation”
Tag Archives: Robotics
OpenCV, ROS-I, & ABB IRB1600 Industrial Arm
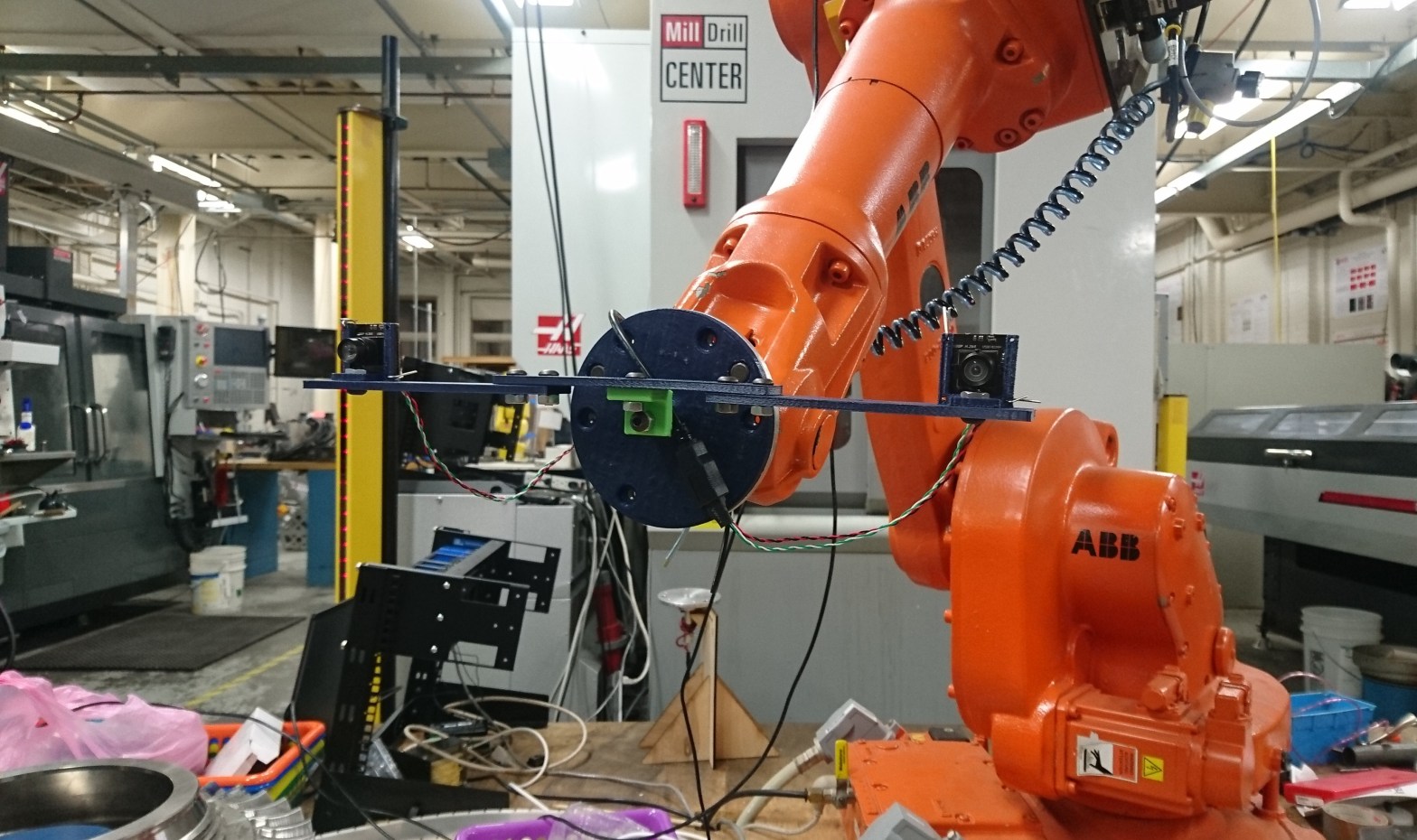
In my industrial robotics course at WPI my team and I worked to implement an object-following industrial arm using OpenCV, ROS-I, and an ABB IRB1600 arm. The premise of the work came from our senior design and fabrication project, where we intend to have a robot ‘observe’ invasive lionfish. To demonstrate progress on the visionContinue reading “OpenCV, ROS-I, & ABB IRB1600 Industrial Arm”
