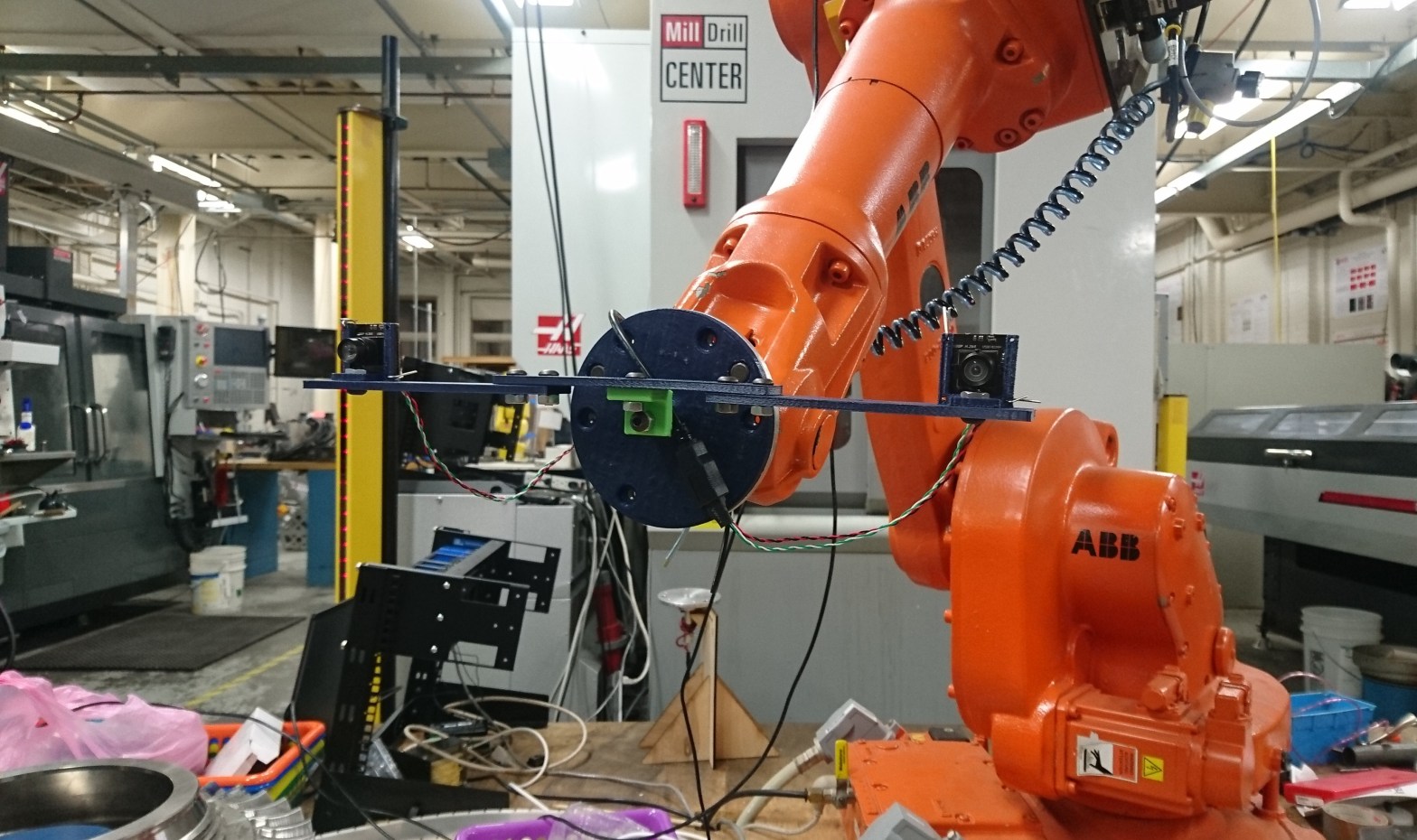
In my industrial robotics course at WPI my team and I worked to implement an object-following industrial arm using OpenCV, ROS-I, and an ABB IRB1600 arm. The premise of the work came from our senior design and fabrication project, where we intend to have a robot ‘observe’ invasive lionfish. To demonstrate progress on the visionContinue reading “OpenCV, ROS-I, & ABB IRB1600 Industrial Arm”
-
Subscribe
Subscribed
Already have a WordPress.com account? Log in now.
